PIV
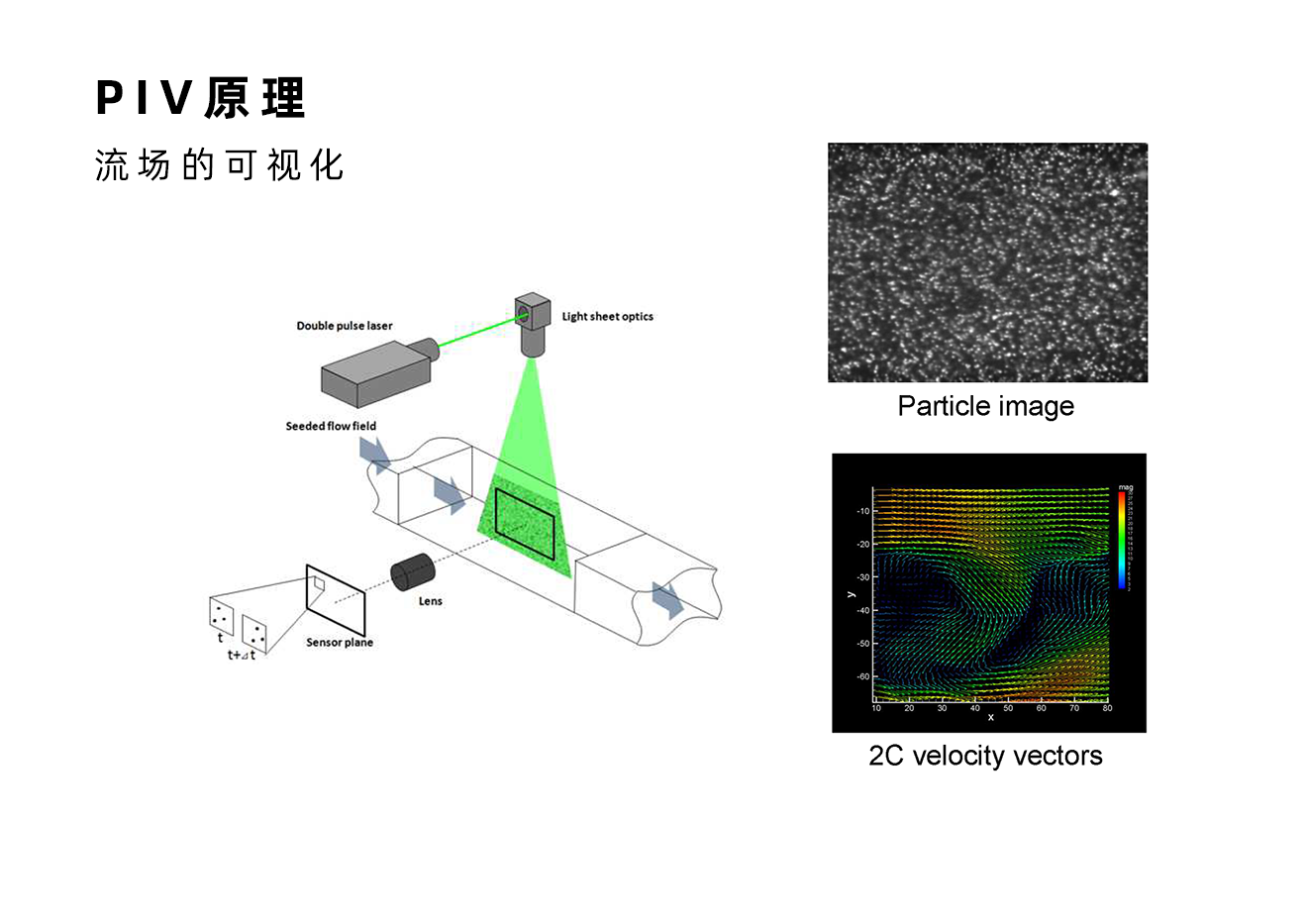
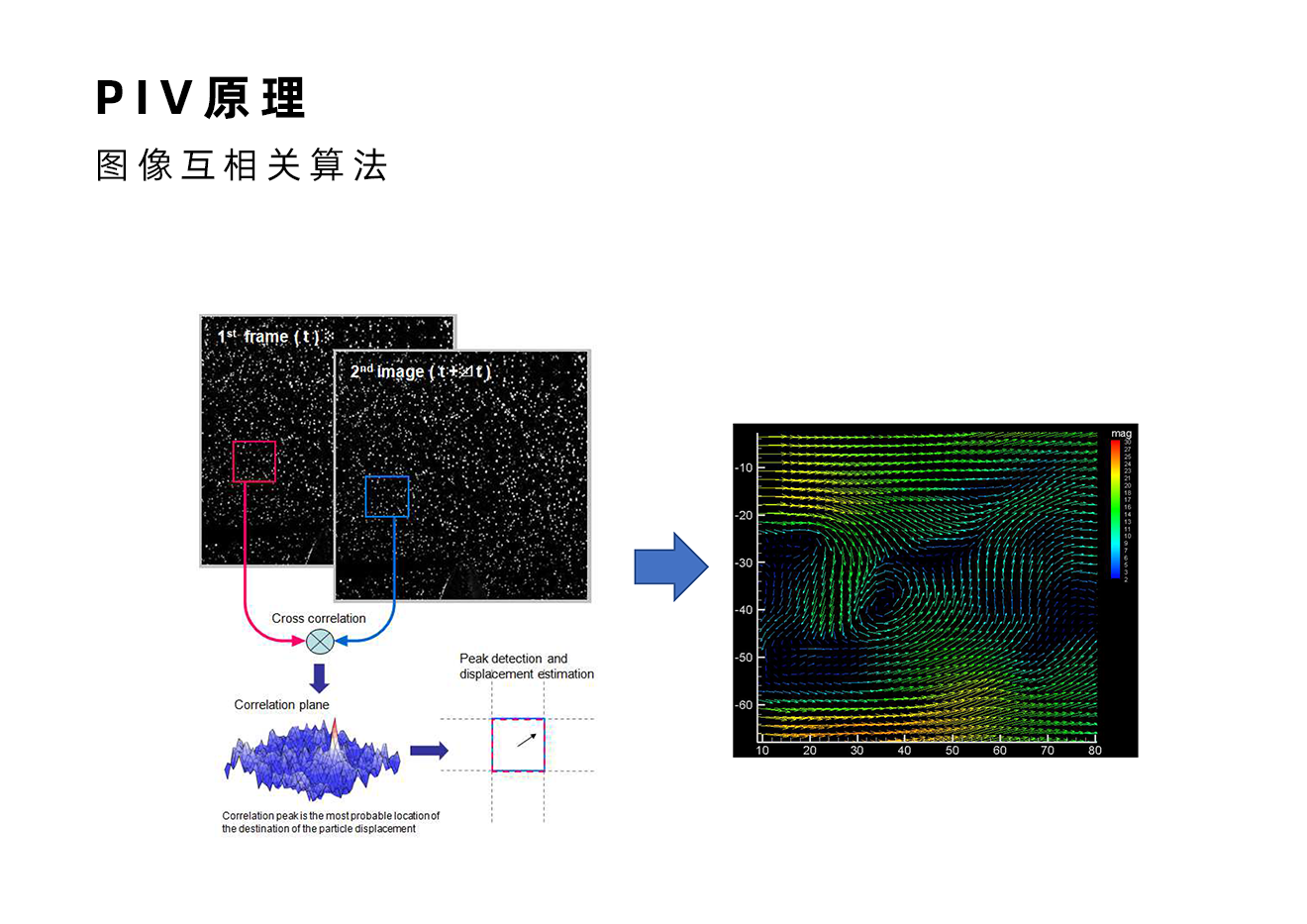
在PIV技术中,速度向量是通过测量粒子在两个激光脉冲之间的运动获得的: V = △X/△t 相机镜头使研究区域在相机传感器上成像,这样相机可以获得每一个激光脉冲的图像。将相机记录下来的两个激光脉冲的图像分成小的区域,我们把这些小的区域称为未知区域。如图所示,两个图像里的未知区域I1和I2是彼此互相关的。这种相关产生了一个信号峰值,从而识别出了粒子位移△X。获得了粒子精确的位移也就获得了粒子的速度。经过重复的互相关计算,可以获得整个研究区域的速度向量图。
3D-PIV
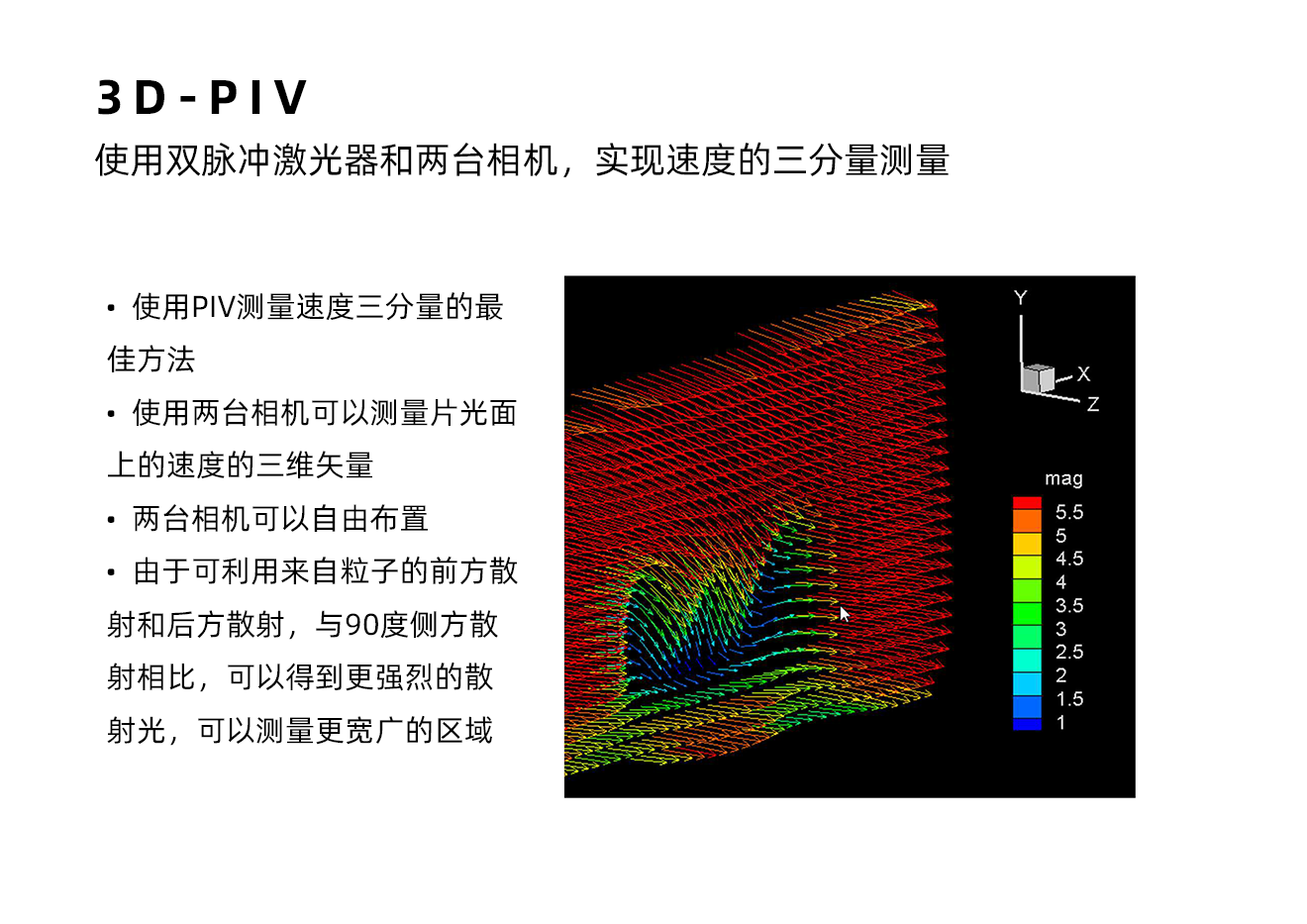
可以测量三个速度分量 立体3D-PIV可以测量光座面的三个速度分量。 (这种二维平面上的三种成分速度矢量图被称为2d3c格式。) 因为流程是三维的运动,通过测定3个分量就可以计算绝对值。
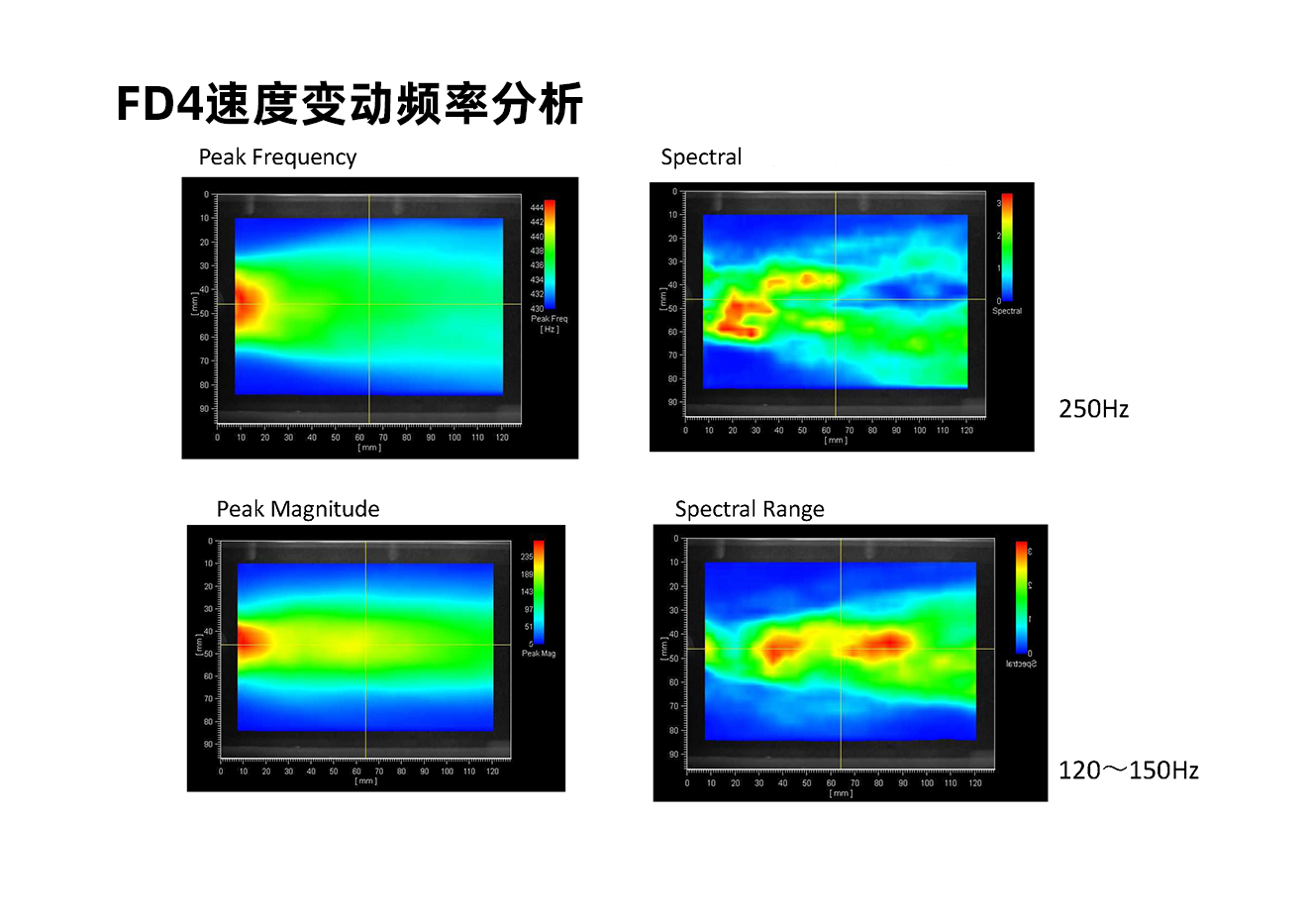
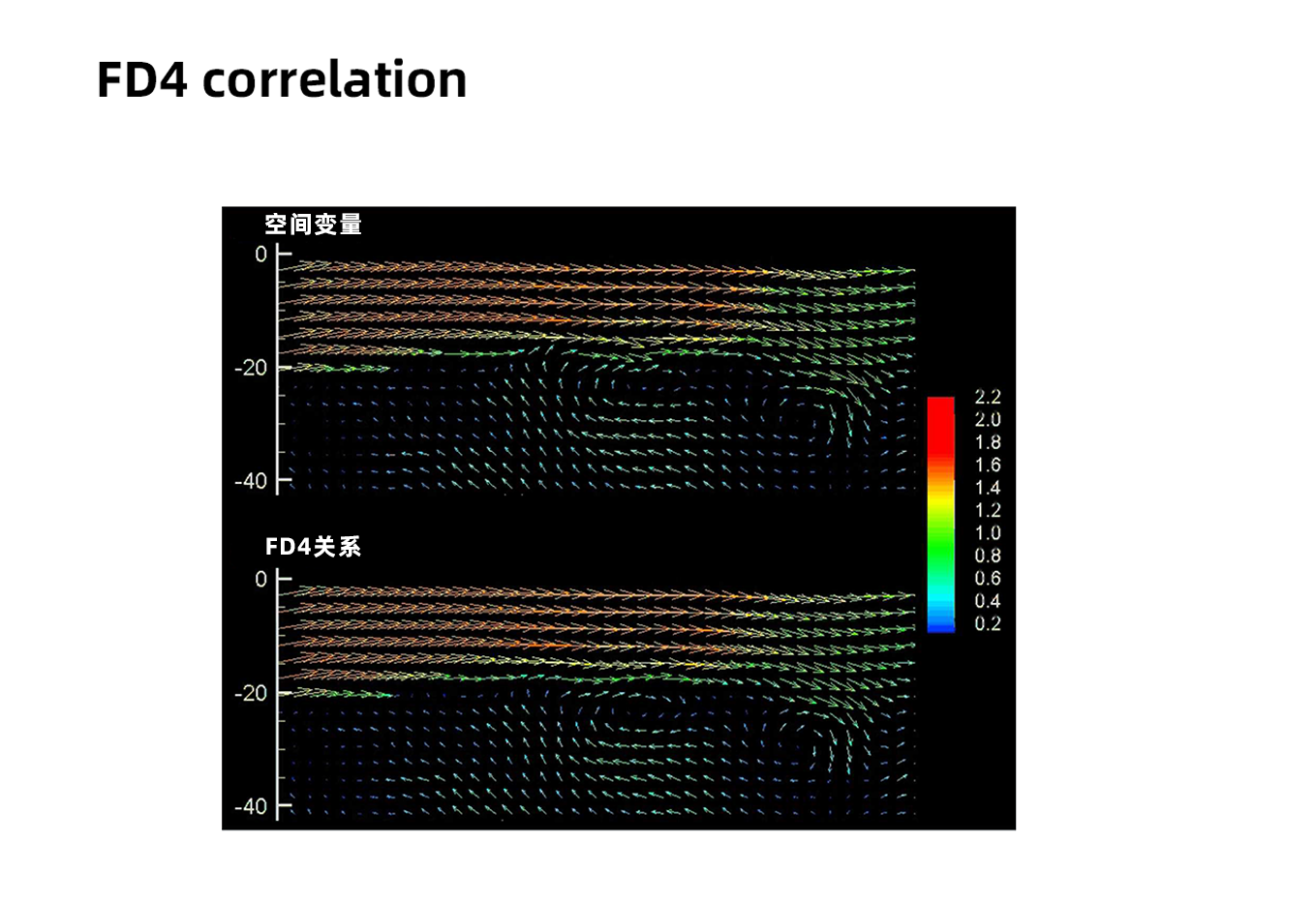
FD4
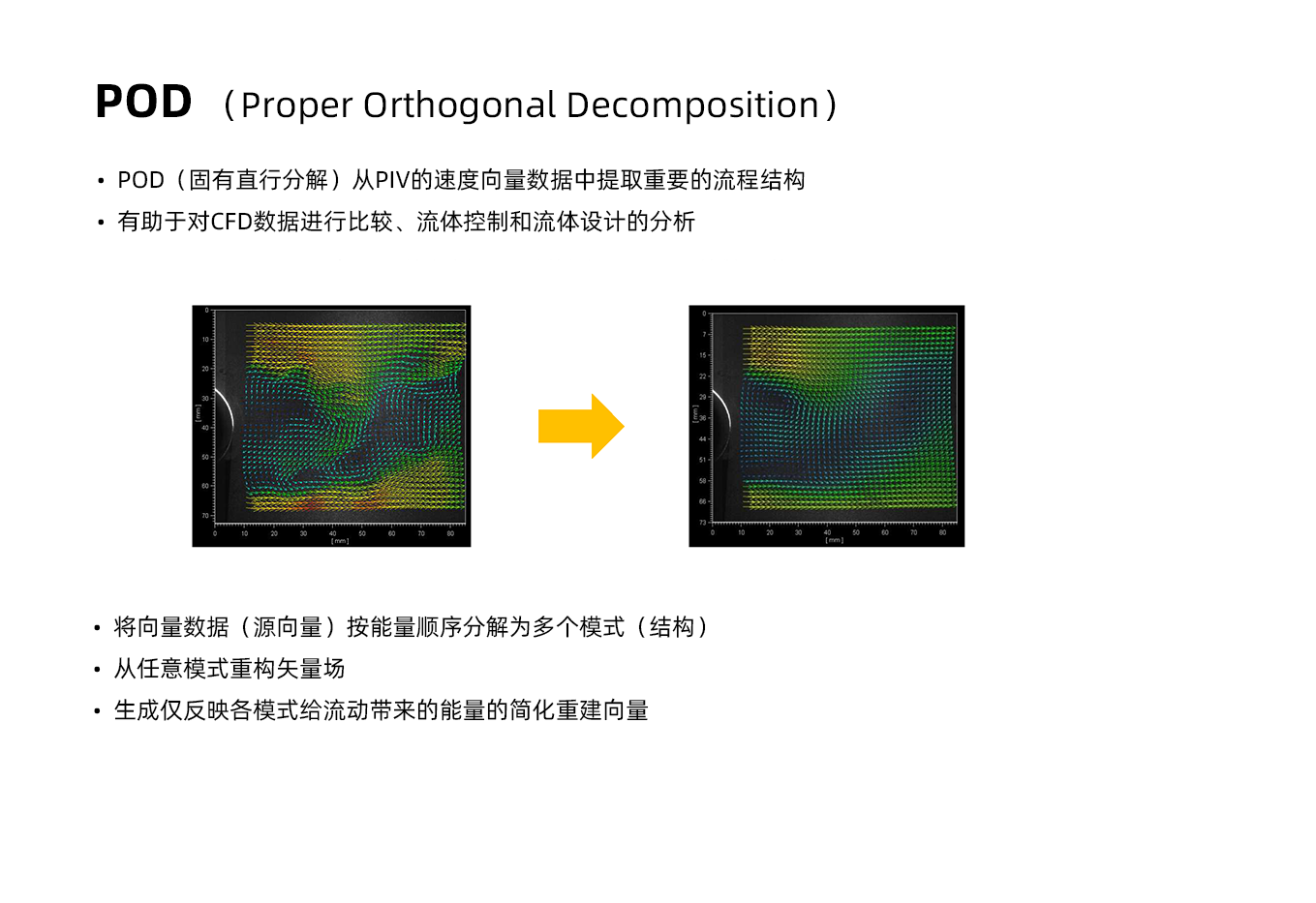
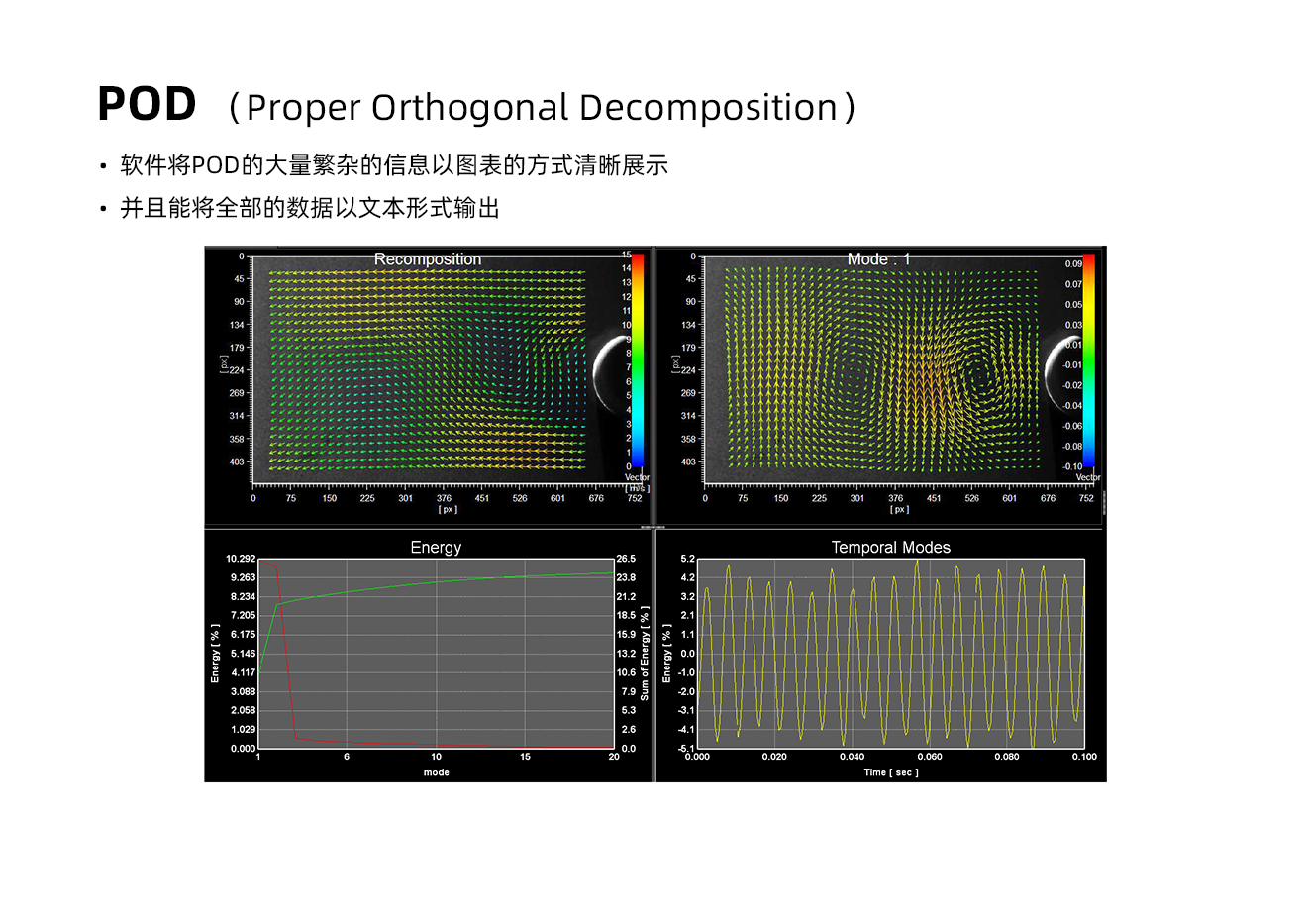
POD